*^9+ eT=MLs1eI1
02 / 04Sunnybrook Hospital — Toronto, ON
Oct 2024 — May 2025
^4 *x&91xsO *BRcvG&wz
Python · PyTorch · QuPath · OME-XML
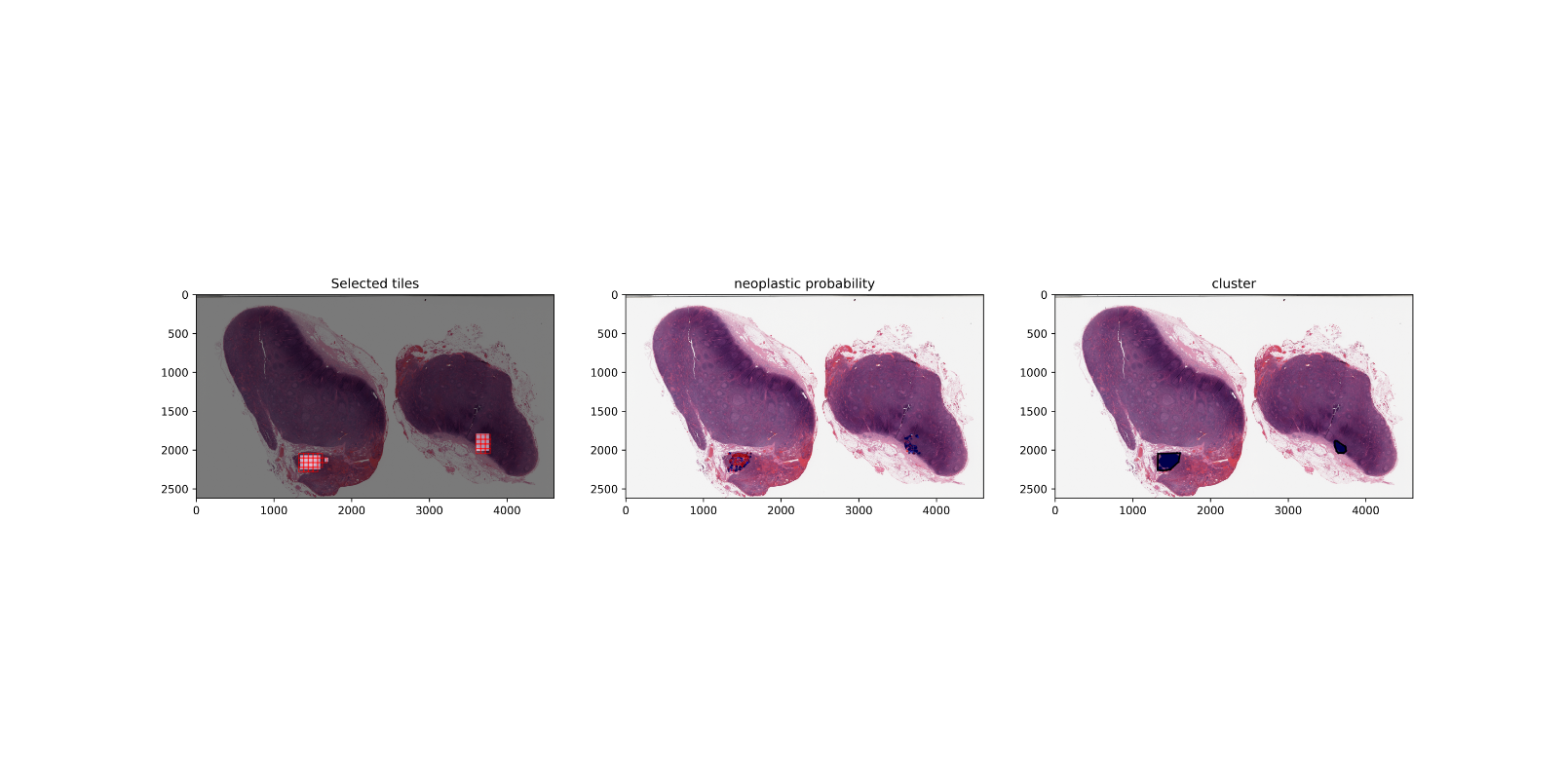
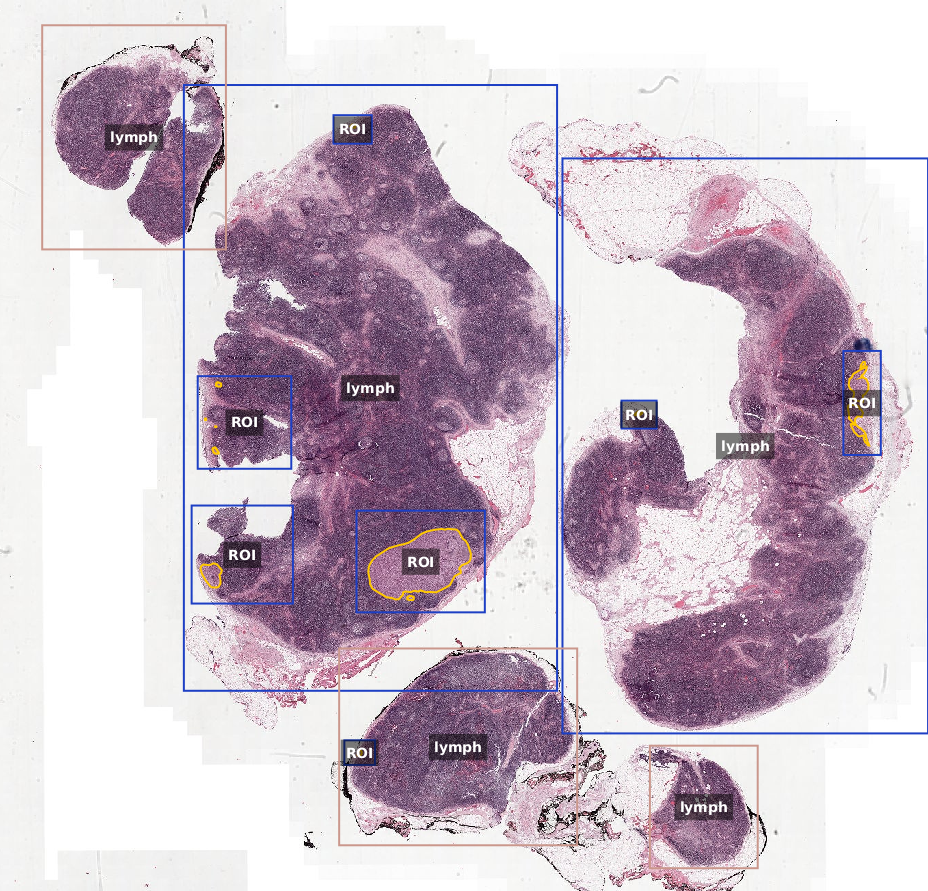
- Engineered automated preprocessing pipelines for histopathology tumor imaging, reducing manual data preparation time by 64% and enabling faster, more scalable model training workflows.
- Built a multi-format image parsing framework supporting .svs and .tif whole-slide scans with QuPath and OME-XML integration, expanding dataset compatibility across research pipelines by 40%.
- Optimized deep learning training pipelines with custom PyTorch classes for flow recomputation, geometric augmentation, and resolution normalization — improving training efficiency by 35%.
- Enhanced AI-assisted tumor segmentation workflows, optimizing GPU-based preprocessing throughput for large-scale model training on high-resolution whole-slide images.